<-References Go to ToC AI Workflows ->
| 1 Functions | 2 Reference Model | 3 Input/Output Data |
1 Functions of Connected Autonomous Vehicle
A Connected Autonomous Vehicle is defined as a physical system that:
- Converses with humans by understanding their utterances, e.g., a request to be taken to a destination.
- Senses the environment where it is located or traverses like the one depicted in Figure 1.
- Plans a Route enabling the CAV to reach the requested destination.
- Autonomously reaches the destination by:
- Moving in the physical environment.
- Building Digital Representations of the Environment.
- Exchanging elements of such Representations with other CAVs and CAV-aware entities.
- Making decisions about how to execute the Route.
- Actuating the CAV motion to implement the decisions.
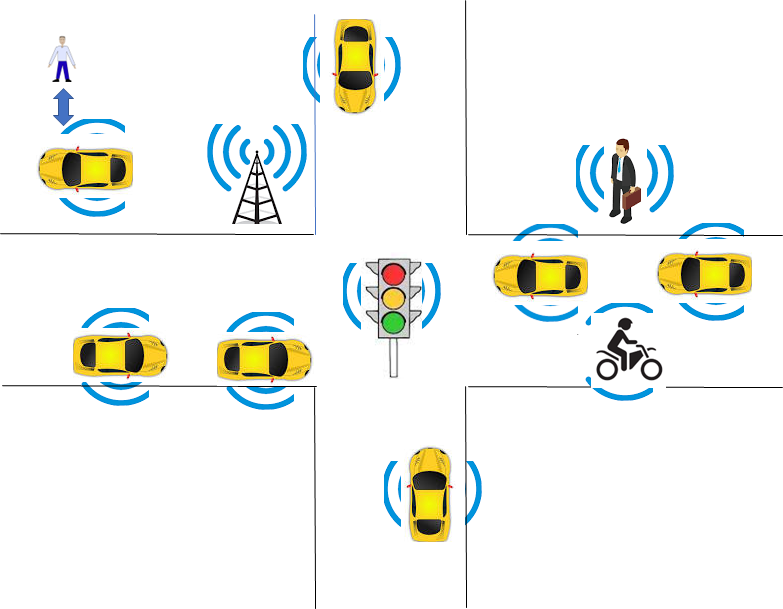
Figure 1 – An environment of CAV operation
2 Reference Architecture of Connected Autonomous Vehicle
The MPAI-CAV Reference Model is composed of four Subsystems:
- Human-CAV Interaction (HCI).
- Environment Sensing Subsystem (ESS),
- Autonomous Motion Subsystem (AMS).
- Motion Actuation Subsystem (MAS).
The Subsystems are represented in Figure 2 where the arrows refer to the exchange of information between Subsystems and between a Subsystem and other CAVs or CAV-aware systems. The sensing of the Environment and the Motion Actuation are represented by icons.
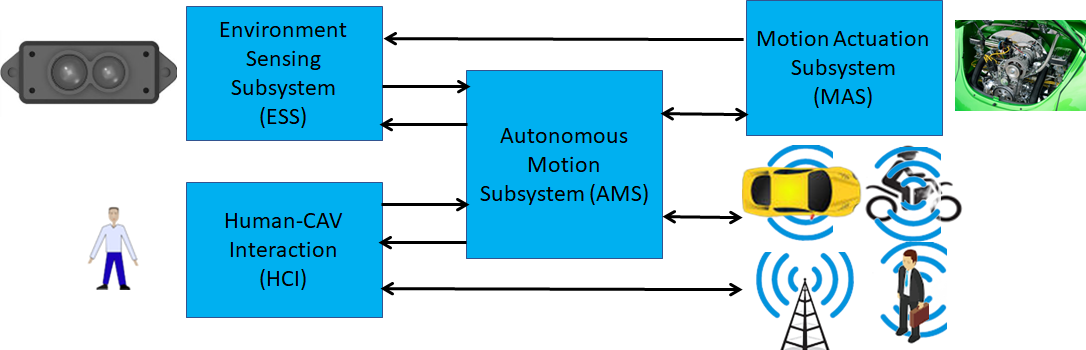
Figure 2 – The MPAI-CAV subsystems
The operation of a CAV unfolds according to the following workflow:
| Entity | Action |
| Human | Requests the CAV, via HCI, to take the human to a destination. |
| HCI | 1. Authenticates humans. |
| 2. Interprets the request of humans. | |
| 3. Issues commands to the AMS. | |
| AMS | 1. Requests ESS to provide the current Pose. |
| ESS | 1. Computes and sends the Basic Environment Descriptors (BED) to AMS. |
| AMS | 1. Computes and sends Route(s) to HCI. |
| HCI | 1. Sends travel options to Human. |
| Human | 1. May integrate/correct their instructions. 2. Issues commands to HCI. |
| HCI | 1. Communicates Route selection to AMS. |
| AMS | 1. Sends the BED to the AMSs of other CAVs. 2. Computes the Full Environment Descriptors (FED). 3. Decides best motion to reach the destination. 4. Issues appropriate commands to MAS. |
| MAS | 1. Executes the Command. 2. Sends response to AMS. |
| Human | 1. Interacts and holds conversation with other humans on board and the HCI. 2. Issues commands to HCI. 3. Requests HCI to render the FED. 4. Navigates the FED. 5. Interacts with humans in other CAVs. |
| HCI | Communicates with HCIs of other CAVs on matters related to human passengers. |
1.3 I/O Data of Connected Autonomous Vehicle
Table 2 gives the input/output data of the Connected Autonomous Vehicle.
Table 2 – I/O data of Connected Autonomous Vehicle
| Input data | From | Description |
| Audio Object | Environment | Captured Environment by Audio. |
| Brake Response | Brakes | Acts on brakes, gives feedback. |
| Ego-Remote AMS Message | Ego AMS | Message to Remote AMS. |
| Ego-Remote HCI Message | Ego HCI | Message to Remote HCI. |
| GNSS Object | ~1 & 1.5 GHz Radio | Data from various Global Navigation Satellite System (GNSS) sources. |
| LiDAR Object | Environment | Environment captured by LiDAR. |
| Motor Response | Wheel Motor | Forces wheels rotation, gives feedback. |
| RADAR Object | Environment | Environment captured by RADAR. |
| Text Object | Cabin Passengers | Text complementing/replacing User input. |
| Ultrasound Object | Environment | Environment captured by Ultrasound. |
| Visual Object | Environment | Environment captured by cameras. |
| Weather Data | Environment | Temperature, Air pressure, Humidity, etc. |
| Wheel Response | Steering Wheel | Moves wheels by an angle, gives feedback. |
| Output data | To | Description |
| AMS Recording Data | Outside device | For analysis of AMS Recording Data. |
| Audio Object | Cabin Passengers | HCI Response, Rendered Full Environment Descriptors. |
| Brake Command | Brakes | To acts on Brakes. |
| Ego-Remote AMS Message | Remote AMS | Message from Ego AMS. |
| Ego-Remote HCI Message | Remote HCI | Message from Ego HCI. |
| Motor Command | Wheel Motors | To activate/suspend/reverse wheels rotation. |
| Text Object | Cabin Passengers | Text from HCI’s impersonation (e.g., avatar). |
| Visual Object | Cabin Passengers | Environment captured by cameras. |
| Wheel Command | Steering Wheel | to moves wheels by an angle. |