| 1 Function | 2 Reference Model | 3 Input/Output Data |
| 4 SubAIMs | 5 JSON Metadata | 6 Profiles |
| 7 Reference Software | 8 Conformance Texting | 9 Performance Assessment |
1 Functions
The Basic Environment Descriptors (CAV-BED) V1.0 AIM produces the Basic Scene Descriptors from Audio, LiDAR, RADAR, Ultrasound, and Visual Scene Descriptors, :
| Receives | Audio Scene Descriptors | From Audio Scene Description. |
| LiDAR Scene Descriptors | LiDAR Scene Description. | |
| RADAR Scene Descriptors | RADAR Scene Description. | |
| Offline Map Scene Descriptors. | Offline Map Scene Description. | |
| Ultrasound Scene Descriptors | Ultrasound Scene Description | |
| Visual Scene Descriptors | Visual Scene Description. | |
| Weather Data | From Motion Actuation Subsystem. | |
| Full Environment Descriptors | From Autonomous Motion Subsystem. | |
| Integrates | EST Scene Descriptors | Into the Basic Scene Descriptors. |
| Produces | Basic Environment Descriptors | To Autonomous Motion Subsystem. |
2 Reference Architecture
Figure 1 depicts the Reference Architecture of the Basic Environment Description AIM.
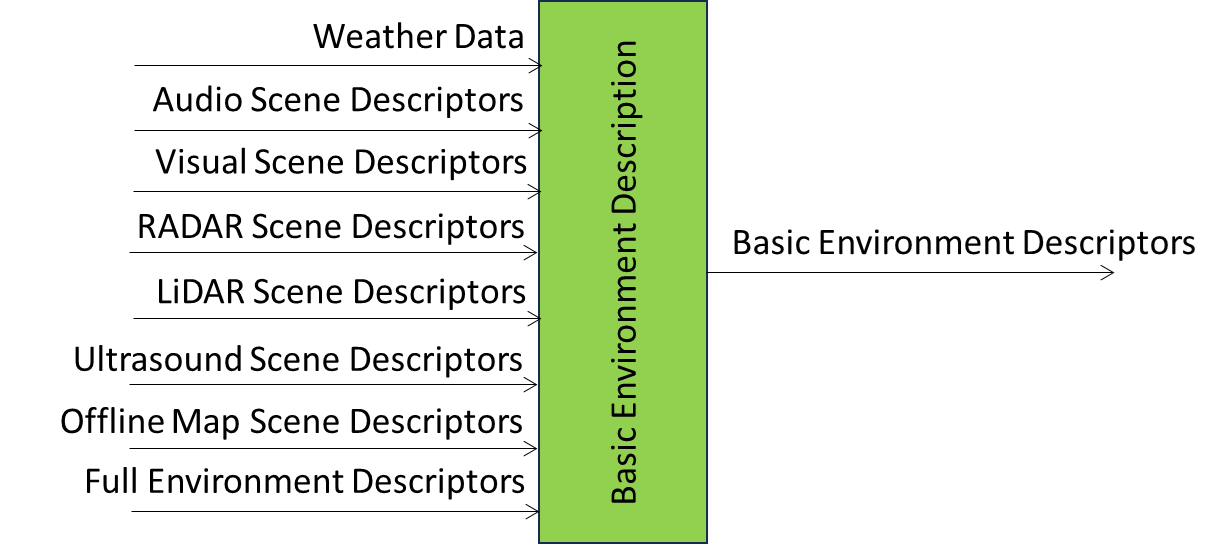
Figure 1 – The Basic Environment Description AIM
3 I/O Data
Table 1 specifies the Input and Output Data of the Basic Environment Description AIM.
Table 1 – I/O Data of the Basic Environment Description AIM
| Input Data | Description |
| Audio Scene Descriptors | Descriptors from Audio Scene Description AIM. |
| LiDAR Scene Descriptors | Descriptors from LiDAR Scene Description AIM. |
| RADAR Scene Descriptors | Descriptors from RADAR Scene Description AIM. |
| Offline Map Scene Descriptors | Descriptors from Offline Map Scene Description AIM. |
| Ultrasound Scene Descriptors | Descriptors from Ultrasound Scene Description AIM. |
| Visual Scene Descriptors | Descriptors from Visual Scene Description AIM. |
| Weather Data | Weather Data from Motion Actuation Subsystem. |
| Full Environment Descriptors | From the Autonomous Motion Subsystem. |
| Output Data | Description |
| Basic Environment Descriptors | Environment Sensing Subsystem’s Basic Environment Descriptors. |
4 SubAIMs
No SubAIMs.
5 JSON Metadata
https://schemas.mpai.community/CAV2/V2.0/AIMs/BasicEnvironmentDescription.json
6 Profiles
No Profiles
7 Reference Software
8 Conformance Testing
9 Performance Assessment