1 Functions
The Traffic Obstacle Avoidance (CAV-TOA) AIM:
| Receives | Full Environment Descriptors | From Full Environment Description. |
| Trajectory | From Motion Selection Planning. | |
| AMS Data | From AMS Memory. | |
| Alert | Alert message form AMS. | |
| AMS-MAS Message | Message from MAS. | |
| Produces | Full Environment Descriptors | To Full Environment Description. |
| Road State | To Full Environment Description. | |
| CAV State | To Full Environment Description. | |
| AMS-MAS Message | Message to MAS. | |
| Alert | To AMS Decision Recording. | |
| Request | To Motion Selection Planning. |
2 Reference Architecture
Figure 1 depicts the Reference Architecture of the Traffic Obstacle Avoidance (CAV-TOA) AIM.
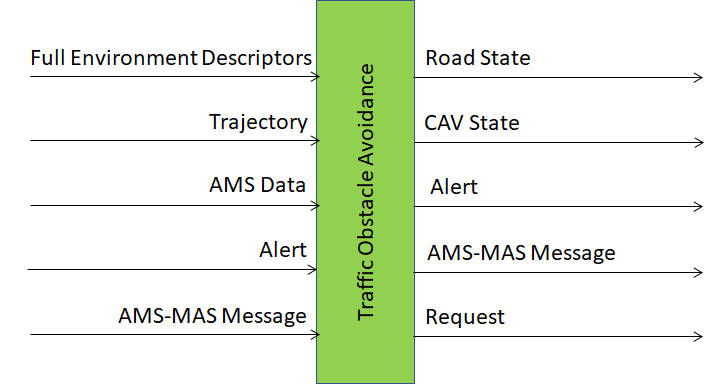 Figure 1 – The Traffic Obstacle Avoidance (CAV-TOA) AIM
Figure 1 – The Traffic Obstacle Avoidance (CAV-TOA) AIM
3 I/O Data
Table 1 specifies the Input and Output Data of the Traffic Obstacle Avoidance (CAV-TOA) AIM.
Table 1 – I/O Data of the Traffic Obstacle Avoidance (CAV-TOA) AIM
| Input | Description |
| Full Environment Descriptors | Provided by CAV-FED AIM. |
| Trajectory | From Motion Selection Planning. |
| AMS Data | CAV Data from AMS Memory. |
| Alert | From ESS. |
| AMS-MAS Message | Message from MAS. |
| Output | Description |
| Full Environment Descriptors | FED updated based on AMS-MAS-Message received from MAS. |
| AMS-MAS Message | Message to MAS. |
| Road State | From AMS-MAS Message response. |
| CAV State | From AMS-MAS Message response. |
| Alert | To AMS Memory |
| Request | For a new Trajectory |
4 SubAIMs
No SubAIMs.
5 JSON Metadata
https://schemas.mpai.community/CAV2/V1.1/AIMs/TrafficObstacleAvoidance.json
6 Profiles
No Profiles