| CAE | CAV | HMC | MMC | OSD | PAF |
| CAV-TEC | AI Workflows | AI Modules |
CAV-TEC
A Connected Autonomous Vehicle (CAV) is a PAAI having as its goal – set by a human or a process – to generate the commands that enable a CAV to reach a destination from the current location.
A CAV is composed of the following PAAIs:
| Human-CAV Interaction | Understand human utterances, such as “take me home” or “show me the environment you see”. |
| Environment Sensing Subsystem | Sense the environment where the CAV is located or which it traverses and produce a local description of the environment. |
| Autonomous Motion Subsystem | Plan a Route enabling the CAV to autonomously reach the requested destination by: – Building improved representation of the Environment. – Making decisions about how to execute the Route. – Improving the Environment Representation by exchanging elements of the Representation with other CAVs and CAV-aware entities. |
| Motion Actuation Subsystem | Implement the Decision by actuating the CAV motion. |
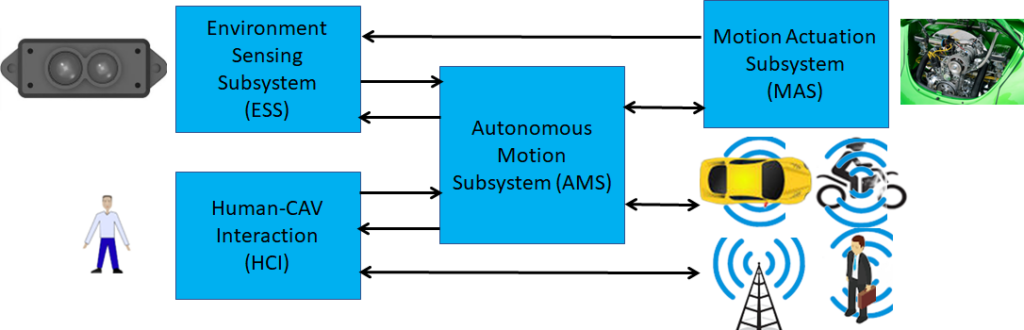
Figure 4 – The CAV-TEC reference Model
HCI is not specified by CAV-TEC V1.0 but by MPAI-MMC V2.3.
1 AI Workflows
1.1 Environment Sensing Subsystem
CAV-ESS is a PAAI composed of the following collaborating PAAIs:
| Spatial Attitude Generation | Integrates GNSS Position with Spatial Data from MAS. |
| EST-specific Scene Descriptions: | Collaborates with the following PAAIs to develop Scene Descriptors: – Other EST-specific Scene Descriptions. – Basic Environment Description. Collaborates with – AMS by sending Alerts if urgency so requires. – CAV-BED by providing their Basic Environment Descriptors. |
| Basic Environment Description | Collaborates with – AMS to obtain its Full Environment Descriptors. – MAS to obtain Weather Data. |
Figure 5 depicts the Reference Model of CAV-ESS V1.0.
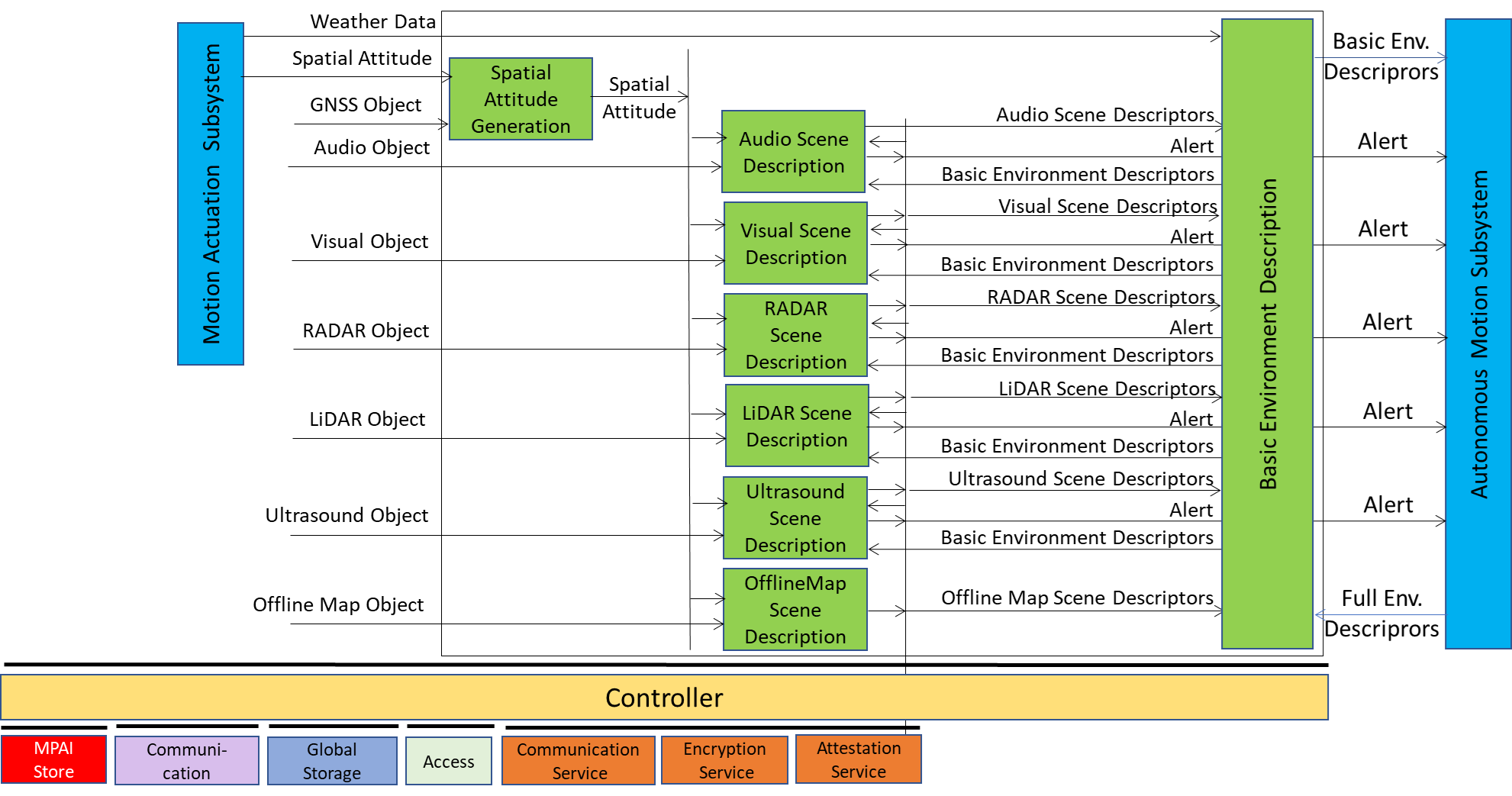
Figure 5 – Reference Model of CAV-ESS V1.0
The following links analyse the AI Modules:
Audio Scene Description
LiDAR Scene Description
Offline Map Scene Description
RADAR Scene Description
Ultrasound Scene Description
Visual Scene Description
CAV-ESS performs Description Level Operations.
1.2 Autonomous Motion Subsystem
The Autonomous Motion Subsystem (AMS) collaborates with:
- CAV-HCI to know what to do (e.g., find the destination).
- CAV-ESS to get a representation of the external environment.
- CAV-AMS to move the CAV
It is a PAAI composed of the following collaborating PAAIs:
| Route Selection PAAI collaborates with | – CAV-HCI PAAI to provides Routes in response to human or process requests.- AMS Memory by storing/retrieving AMS Data. |
| Full Environment Description PAAI collaborates with: | – ESS by: – Providing its Full Environment Descriptors. – Receiving the ESS’s Basic Environment Descriptors – Remote AMSs by exchanging snapshots of its Full Environment Descriptors. |
| Trajectory Planning and Decision PAAI collaborates with: | – Route Selection Planning by implementing Routes. – Full Environment Description by providing Environment Descriptors. – CAV-MAS by providing Trajectories. – AMS Memory by storing AMS Data for later retrieval. |
Trajectory Planning and Decision is composed of the following PAAIs:
- Path Selection Planning selecting Paths and requesting Routes if none is acceptable.
- Motion Selection Planning selecting Trajectories and requesting Paths if none is acceptable.
- Traffic Obstacle Avoidance checking Trajectories’ compatibility with Alerts and requesting Trajectories if none is acceptable.
Figure 6 depicts the Reference Model of CAV-AMS V1.0.
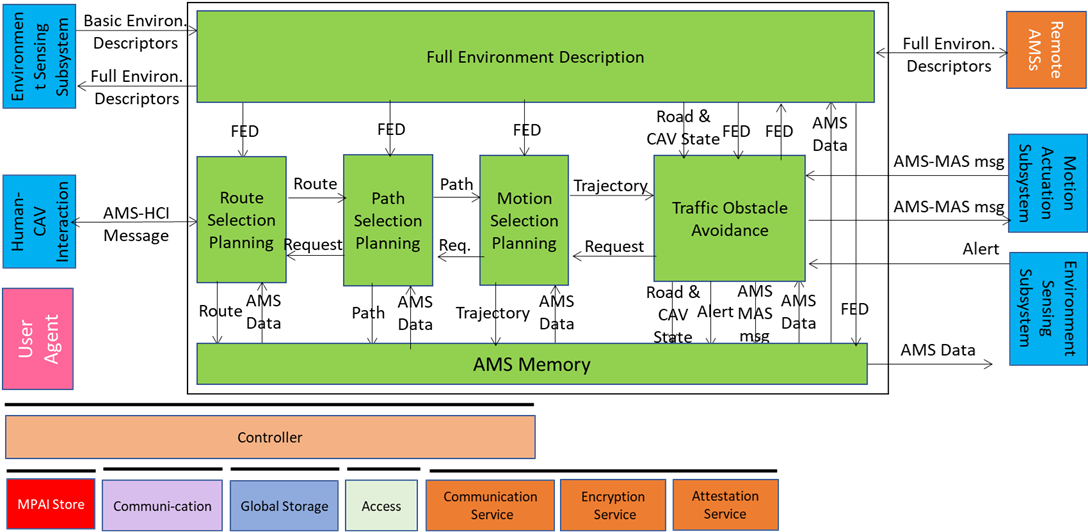
Figure 6 – Reference Model of CAV-AMS V1.0
The following links analyse the AI Modules:
Trajectory Planning and Decision
CAV-AMS performs Description-Interpretation-Conclusion-Communication-Goal setting-Planning-Decision-Storage/Retrieval Level Operation.
1.3 Motion Actuation Subsystem
The Motion Actuation Subsystem (MAS) is a PAAI that actuates the movement instructions received and reporting about their execution.
It is composed of the following collaborating PAAIs:
| AMS Message Interpretation | – Receives AMS-MAS Messages with Trajectories – Splits AMS-MAS Messages into 3 Commands sent to Brakes-Motors-Wheel. |
| MAS Response Analysis | – Receives Brake-Motor-Wheel responses. – Analyses Brakes-Motors-Wheel responses. – Sends the MAS response to AMS. |
| MAS Spatial Attitude Generation | – Converts Spatial data into Spatial Attitude. |
| Ice Condition Analysis | – Analyses the Brakes-Motors-Wheel responses. – Considers the MAS Spatial Attitude and Weather Data. – Updates Weather Data. |
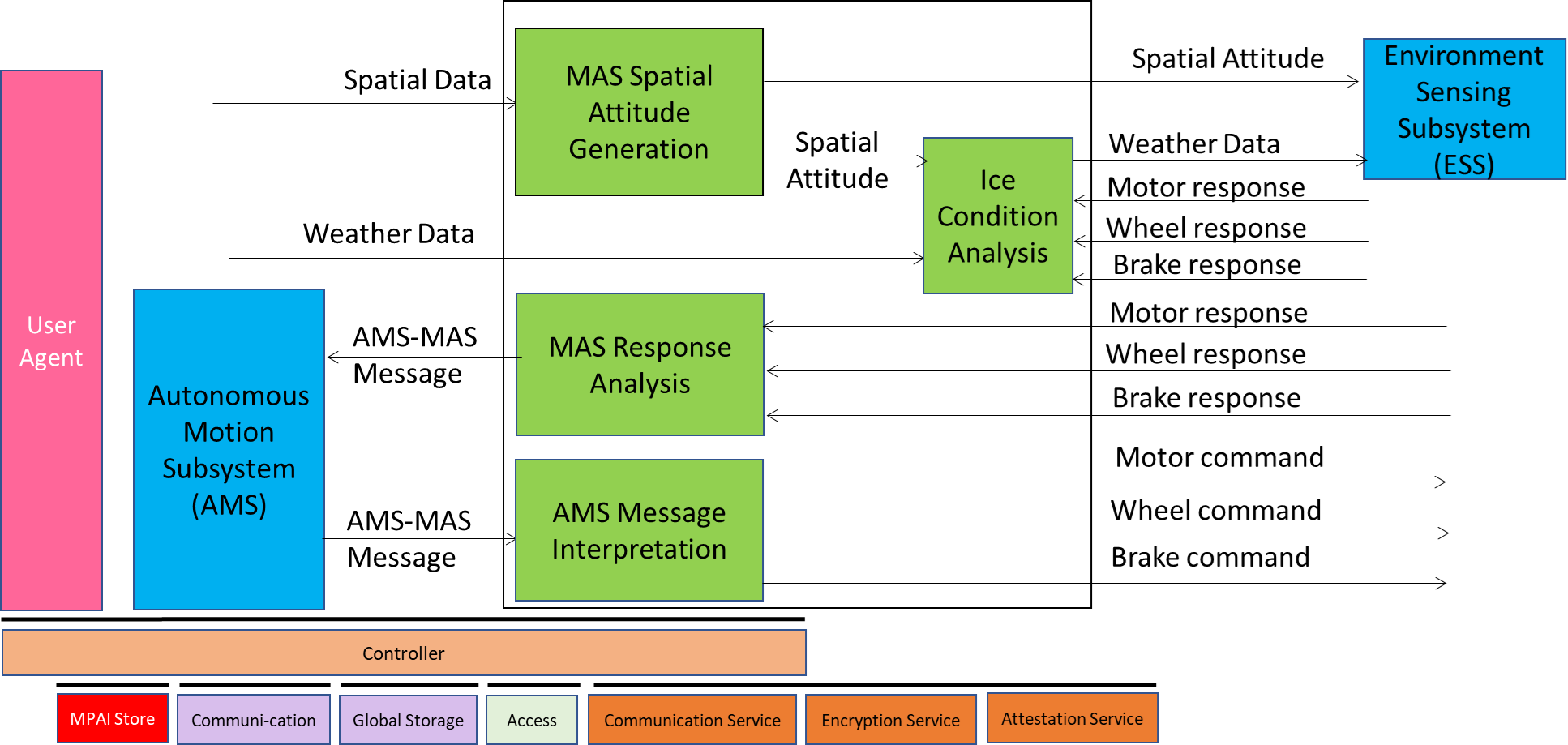
Figure 7 – Reference Model of CAV-MAS V1.0
The following links analyse the AI Modules:
AMS-MAS Message Interpretation
MAS Spatial Attitude Generation
CAV-MAS performs Description-Interpretation-Conclusion-Decision Level Operations.
2 AI Modules
2.1 AMS Memory
CAV-AMM is a PAAI tasked with the storage and processing of data generated by CAV-AMS that includes:
| Full Environment Descriptors | Route | Path | Trajectory | Alert | Road State | CAV State | AMS-MAS Message | Time |
CAV-AMM produces on request by an AMS PAAI a selection of the nine data types above. All this data can be processed and organised in ways that better respond to the needs of the PAAIs requesting the data.
CAV-AMM performs Experience Storage-Retrieval Level Operation.
2.2 AMS-MAS Message Interpretation
CAV-AMI is a PAAI that:
- Receives an AMS-MAS Message
- Converts the Message to appropriate Commands that activate some of Brakes, Motors, and Wheel by an amount.
If the AMS sends MAS an AMS-MAS Message to change to a left lane, the Message should be converted to Commands to
- The Motors to apply higher torque (and the right Motors slightly more so).
- The Wheel to turn by an appropriate number of degrees.
The conversion of Message to Command can be performed by some pre-loaded embedded logic or by a suitably trained Neural Network.
CAV-AMI may perform Data Processing or Reasoning Level Operation.
2.3 Basic Environment Description
CAV-BED is a PAAI that:
| Receives | Audio Scene Descriptors | From Audio Scene Description. |
| LiDAR Scene Descriptors | LiDAR Scene Description. | |
| RADAR Scene Descriptors | RADAR Scene Description. | |
| Offline Map Scene Descriptors | Offline Map Scene Description. | |
| Ultrasound Scene Descriptors | Ultrasound Scene Description | |
| Visual Scene Descriptors | Visual Scene Description. | |
| Weather Data | From Motion Actuation Subsystem. | |
| Full Environment Descriptors | From Autonomous Motion Subsystem. | |
| Integrates | EST-specific Scene Descriptors | Into the Basic Scene Descriptors. |
| Produces | Basic Environment Descriptors | To Autonomous Motion Subsystem. |
The Basic Environment Descriptors result from the merger of:
- Non-Audio Scene Descriptors providing representations of the environment into one set of Visual Scene Descriptors
- Audio Scene Descriptors into Audio-Visual Scene Descriptors.
- Weather Data.
CAV-BED typically performs Description Level Operations.
2.4 Full Environment Description
CAV-FED is a PAAI that
| Receives | Basic Environment Descriptors | From Environment Sensing Subsystem. |
| Full Environment Descriptors | From CAVs in range to create an improved version of its BED. | |
| Road State | From Traffic Obstacle Avoidance. | |
| CAV State | From Traffic Obstacle Avoidance. | |
| AMS Data | CAV Data from AMS Memory AIM. | |
| Creates | Environment representation | By fusing Data from ESS, Remote AMSs, and other CAV-aware entities. |
| Updates | CAV State | Managed by AMS. |
| Produces | Full Environment Descriptors | Sent to: – Route, Path, Motion Selection Planning – Traffic Obstacle Avoidance – AMS Decision Recording. |
Each CAV-FED PAAI may share its FED with its remote CAV-FED peers because remote CAVs’ FED may include information that is slightly outdated but may contain information not accessible by the Ego CAV-AMS.
To achieve this, CAV-FED analyses its BED/FED to discover areas of the BED/FED that are not properly represented because the CAV sensors were not able to sense that information.
CAV-FED performs Reasoning Level Operations.
2.5 Ice Condition Analysis
CAV-ICA is a PAAI that
| Receives | Weather Data | From internal sensing devices. |
| Brake Response | From mechanical subsystem | |
| Motor Response | From mechanical subsystem | |
| Wheel Response | From mechanical subsystem | |
| Produces | Weather Data | With improved Ice Conditions |
CAV-ICA PAAI must discover the presence of ice on the road from Weather Data, Spatial Attitude and responses of Brakes, Motors, and Wheel. The analysis of this combination of data could be made by embedded data processing algorithms or by using a suitably trained Neural Network.
Depending on the depth of the analysis performed, CAV-ICA may perform Reasoning Level Operations.
2.6 MAS Response Analysis
CAV-MRA is a PAAI that
| Receives | Brake Response | From mechanical subsystem |
| Motor Response | From mechanical subsystem | |
| Wheel Response | From mechanical subsystem | |
| Road State | From Ice Condition Analysis | |
| Analyses | Feedback | From Brakes, Motors, and Wheel |
| Produces | AMS-MAS Message | To AMS |
CAV-MRA analyses the feedback from the mechanical subsystems to discovery anomalies in the feedbacks to data provided as input to Brakes, Motors, and Wheel, such as ice on the road (detected by Ice Condition Analysis).
Depending on the depth of the analysis performed, CAV-MRA may be implemented by a neural network trained using actual road situations.
CAV-MRA performs Reasoning Level Operation.
2.7 MAS Spatial Attitude Generation
CAV-MSA is a PAAI that
| Receives | Spatial Data | From Odometer Data, Speedometer Data, Accelerometer Data, and Inclinometer Data. |
| Produces | Spatial Attitude | Initial estimate of CAV’s Spatial Attitude using information available at MAS. |
CAV-MSA performs Data Processing Level Operation.
2.8 Motion Selection Planning
CAV-MSP is a PAAI that:
| Receives | Full Environment Descriptors | From Full Environment Description. |
| AMS Data | CAV Data from AMS Memory. | |
| Path | From Path Selection Planning. | |
| Request | From CAV-TOA | |
| Produces | Trajectory | To Traffic Obstacle Avoidance and AMS Memory. |
| Request | For a new Path if no Trajectory can be implemented |
CAV-MSP determines, for a road segment, the Spatial Attitude that the CAV will assume when it will reach the end of the next road segment.
The decision to reach the target Spatial Attitude at a certain time frame should consider:
- The no-collision constraint (perhaps with a smaller margin than in the case of Path Selection Planning).
- The maximum acceleration tolerable by passengers that the CAV is capable of.
- The need to change lanes to overtake cars, etc.
- The need to respect Traffic Rules, e.g. the local maximum/minimum speed.
CAV-MSP requests a new Path its it end up with the Trajectory not being possible.
The way to achieve it may be determined by:
- Searching for an optimal path in the Scene that solves an optimisation problem (Descriptor Level Operation).
- Interpreting the CAVs trajectories, e.g., if a car is reducing speed and its angle with the road is changing, the car may be changing lanes or turning (Interpretation Level Operation).
- Using information explicitly sent by another CAV via an Ego-Remote AMS Message (Communication Level Operation).
- Reasoning on the above information (Reasoning Level Operation).
2.9 Path Selection Planning
CAV-PSP is a PAAI that:
| Receives | Full Environment Descriptors | From Full Environment Description. |
| AMS Data | From AMS Memory | |
| Route | From Route Selection Planning. | |
| Request | For a new Path by CAV-MSP. | |
| Produces | Path | To Motion Selection Planning. |
| Request | For a new Route. |
CAV-PSP decides which Path the CAV should go through in a specified time horizon to execute the portion of the Route. The Path can be determined purely based on the kinematics and dynamics of the relevant cars and other moving objects (e.g., the constraint that the CAV does not collide with or come too close to another CAV).
If CAV-PSP is unable to find a Path, it requests a new Route to CAV-RSP.
CAV-PSP performs Descriptor Level Operation.
2.10 Route Selection Planning
CAV-RSP is a PAAI that:
| Receives | Full Environment Descriptors | From Full Environment Description |
| AMS Data | From AMS Memory. | |
| AMS-HCI Message | From Human-Machine Interaction AIW | |
| Produces | AMS-HCI Message | To Human-Machine Interaction AIW |
| Route | To Path Selection Planning and AMS Decision Recording |
CAV-RSP can perform its function in a variety of ways depending on the complexity of the request, e.g.:
- Simple look up in a map.
- Solution of an optimisation problem based on constraints such as minimum time or or minimum distance
and may consider Experiences.
CAV-RSP may perform Data Processing, Experience Retrieval, or Reasoning Level Operation.
2.11 Spatial Attitude Generation
The Spatial Attitude Generation (CAV-SAG) AIM:
| Receives | GNSS Object | From GNSS receiver. |
| Spatial Attitude | From initial Spatial Attitude computed by MAS. | |
| Integrates | Two data streams | GNSS and Initial Spatial Attitude. |
| Produces | Spatial Attitude | The CAV’s reference Spatial Attitude. |
In normal conditions, GNSS provides the most accurate Position estimate. In a tunnel or urban channel, however, Position has to be provided by Odometer Data.
Orientation, Velocity and Acceleration are provided by Inclinometer, Speedometer, and Accelerometer Data.
CAV-SAG performs Data Processing Level Operation.
2.12 Traffic Obstacle Avoidance
CAV-TOA is a PAAI that:
| Receiving | Full Environment Descriptors | From Full Environment Description. |
| Trajectory | From Motion Selection Planning. | |
| AMS Data | From AMS Memory. | |
| Alert | Alert message form AMS. | |
| AMS-MAS Message | Message from MAS. | |
| Producing | Full Environment Descriptors | To Full Environment Description. |
| Road State | To Full Environment Description. | |
| CAV State | To Full Environment Description. | |
| Request | To Motion Selection Planning. |
CAV-TOA verifies that any Alert signal does not include an object that will collide with the current Ego CAV Trajectory. If such as object is found, a new Trajectory is requested to CAV-MSP.
If there is no need to reconsider the Trajectory, the Traffic Obstacle Avoider AIM sends an AMS-MAS Message to the Motion Actuation Subsystem (MAS) so that the CAV can move ahead.
CAV-TOA performs Descriptors Level Operation.
2.13 Trajectory Planning and Decision
CAV-TPD is a PAAI comprising a set of collaborating PAAIs that:
| Receives | AMS Data | Data collected by AMS Memory. |
| Alert | Alert message form ESS. | |
| AMS-MAS Message | Response from MAS. | |
| Full Environment Descriptors | From Full Environment Description. | |
| Route | From Route Selection Planning. | |
| Produces | AMS-MAS Message | Message to MAS. |
| CAV State | To Full Environment Description and MAS. | |
| Road State | To Full Environment Description and MAS. | |
| Alert | To AMS Memory. | |
| Request | To Route Selection Planning |
CAV-TPD
- Integrates the three PAAIs Path Selection Planning, Motion Selection Planning, and Traffic Obstacle Avoidance.
- Plans, decides, and actuates AMS-MAS Messages containing the Target Spatial Attitude.
- Sends a request for a new Route if no Target Spatial Attitude is possible.
- Passes any updated Road State and CAV State to Full Environment Description.
- Stores and retrieves relevant internal data from AMS Memory.
- Is “adaptable” because it dynamically adjusts its operation based on an Alert coming from a technology-specific Scene Description AIM.
CAV-TPD performs Descriptors, Interpretation, Reasoning, Goal Setting, Planning, Conclusion, and Decision Level Operation.