| 1 Functions | 2 Reference Model | 3 I/O Data |
| 4 Functions of AI Modules | 5 I/O Data of AI Modules | 6 AIW, AIMs, and JSON |
| 7 Reference Software | 8 Conformance Testing | 9 Performance Assessment |
1 Functions
The Environment Sensing Subsystem (ESS) of a Connected Autonomous Vehicle (CAV):
- Senses the environment’s
- Electromagnetic information from GNSS, LiDAR, RADAR, Visual sources.
- Acoustic information from Audio (16-20,000 Hz) and Ultrasound sources.
- Receives, based on Data available at the Motion Actuation Subsystem,
- An estimate of the Ego CAV’s Spatial Attitude .
- Weather information (e.g., temperature, pressure, humidity, etc.).
- Requests location-specific Data from Offline Map(s).
- Produces the best estimate of the Ego CAV Spatial Attitude by improving the location information received from MAS with GNSS information.
- Produces EST-specific Scene Descriptors using Data stream from specific Environment Sensing Technologies (EST) on board the CAV (Audio, Visual, LiDAR, RADAR, Ultrasound, and Offline Map Data).
- Produces a sequence of Basic Environment Descriptors. i.e., Scene Descriptors enhanced by additional information (BED) at a CAV-specific frequency by integrating the different EST-specific Scene Descriptors, Full Environment Descriptors at a previous time, and Weather Data.
- Passes the BEDs to the Human-CAV Interaction (HCI) and Autonomous Motion (AMS) Subsystems.
- Requests elements of the Full Environment Representations (FER) produced by AMS.
2 Reference Model
Figure 1 gives the Reference Model of the Environment Sensing Subsystem.
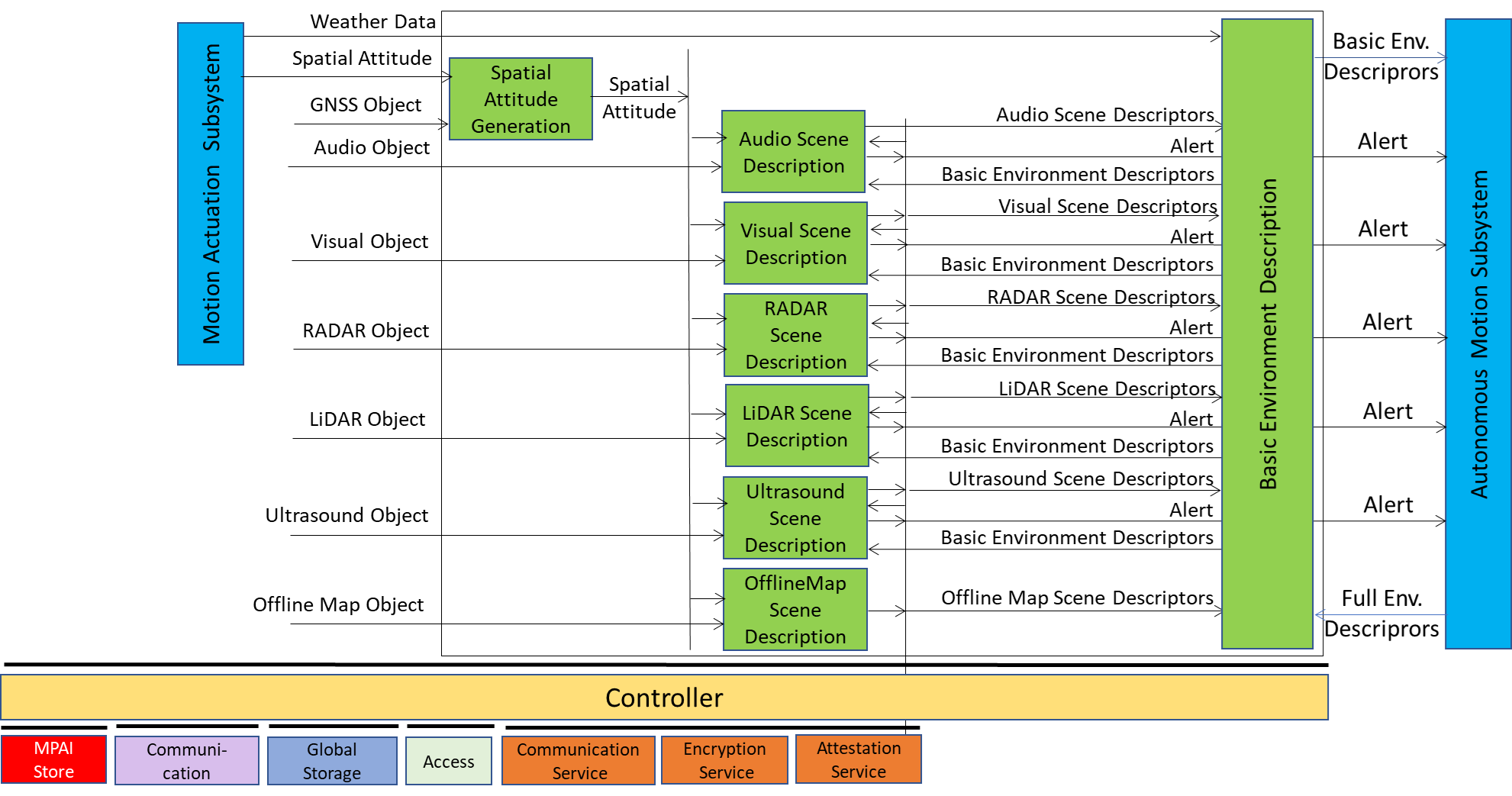 Figure 1 – Environment Sensing Subsystem Reference Model
Figure 1 – Environment Sensing Subsystem Reference Model
The sequence of operations of the Environment Sensing Subsystem unfolds as follows:
- The Spatial Attitude Generation AIM computes the CAV’s Spatial Attitude using the initial Motion Actuation Subsystem’s Spatial Attitude and GNSS Object.
- All EST-specific Scene Description AIMs available onboard:
- Receive EST-specific Data Objects, e.g., the RADAR Scene Descriptions AIM receives a RADAR Object provided by the RADAR EST (not shown in Figure 1). The Online Map is considered as an EST.
- Produce and send Alerts, if necessary, to the Autonomous Motion Subsystem.
- Accesses Basic Environment Descriptors of previous times, if needed.
- Produce EST-specific Scene Descriptors, e.g., the RADAR Scene Descriptors.
- The Basic Environment Description AIM integrate the different EST-specific Scene Descriptors, Weather Data, and Road State into the Basic Environment Descriptors.
Note 1: Although Figure 1 shows individually processed ESTs, an implementation may combine two or more Scene Description AIMs to handle two or more ESTs, provided the relevant interfaces are preserved.
Note 2: The Objects in the BEDs may carry Annotations specifically related to traffic signalling,, e.g.:
- Position and Orientation of traffic signals in the environment:
- Traffic Policemen
- Road signs (lanes, turn right/left on the road, one way, stop signs, words on the road).
- Traffic signs – vertical signalisation (signs above the road, signs on objects, poles with signs).
- Traffic lights
- Walkways
- Traffic sound (siren, whistle, horn).
3 I/O Data
Table 1 gives the input/output data of the Environment Sensing Subsystem.
Table 1 – I/O data of Environment Sensing Subsystem
| Input data | From | Comment |
| RADAR Object | ~25 & 75 GHz Radio | Environment Capture with Radar |
| LiDAR Object | ~200 THz infrared | Environment Capture with Lidar |
| Visual Object | Video (400-800 THz) | Environment Capture with visual cameras |
| Ultrasound Object | Audio (>20 kHz) | Environment Capture with Ultrasound |
| Offline Map Object | Local storage or online | cm-level data at time of capture |
| Audio Object | Audio (16 Hz-20 kHz) | Environment or cabin Capture with Microphone Array |
| GNSS Object | ~1 & 1.5 GHz Radio | Get Pose from GNSS |
| Spatial Attitude | Motion Actuation Subsystem | To be fused with Pose from GNSS Data |
| Weather Data | Motion Actuation Subsystem | Temperature, Humidity, etc. |
| Full Environment Descriptors | Autonomous Motion Subsystem | FED refers to a previous time. |
| Output data | To | Comment |
| Alert | Autonomous Motion Subsystem | Critical information from an EST. |
| Basic Environment Descriptors | Autonomous Motion Subsystem | ESS-derived Environment Descriptors |
4 Functions of AI Modules
Table 2 gives the functions of all AIMs of the Environment Sensing Subsystem.
Table 2 – Functions of Environment Sensing Subsystem’s AI Modules
| AIM | Function |
| Spatial Attitude Generation | Computes the CAV Spatial Attitude from CAV Centre using GNSS Object and MAS’s initial Spatial Attitude. |
| Audio Scene Description | Produces Audio Scene Descriptors and Alert. |
| Visual Scene Description | Produces Visual Scene Descriptors and Alert. |
| LiDAR Scene Description | Produces LiDAR Scene Descriptors and Alert. |
| RADAR Scene Description | Produces RADAR Scene Descriptors and Alert. |
| Ultrasound Scene Description | Produces Ultrasound Scene Descriptors and Alert. |
| Offline Map Scene Description | Produces Offline Map Scene Descriptors. |
| Basic Environment Description | Produces Basic Environment Descriptors. |
5 I/O Data of AI Modules
For each AIM (1st column), Table 3 gives the input (2nd column) and the output data (3rd column) of the Environment Sensing Subsystem. Note that the Basic Environment Representation in column 2 refers to a previously produced BER.
Table 3 – I/O Data of Environment Sensing Subsystem’s AI Modules
6 AIW, AIMs, and JSON
Table 4 – AIW, AIMs, and JSON Metadata
| AIW | AIM | Name | JSON |
| CAV-ESS | Environment Sensing Subsystem | X | |
| CAE-ASD | Audio Scene Description | X | |
| CAV-BED | Basic Environment Description | X | |
| CAV-LSD | LiDAR Scene Description | X | |
| CAV-OSD | Offline Map Scene Description | X | |
| CAV-RSD | RADAR Scene Description | X | |
| CAV-SAG | Spatial Attitude Generation | X | |
| CAV-USD | Ultrasound Scene Description | X | |
| OSD-VSD | Visual Scene Description | X |
7 Reference Software
8 Conformance Testing