1 Functions of Environment Sensing Subsystem.. 17
2 Reference Architecture of Environment Sensing Subsystem.. 18
3 I/O Data of Environment Sensing Subsystem.. 18
4 Functions of Environment Sensing Subsystem’s AI Modules. 19
5 I/O Data of Environment Sensing Subsystem’s AI Modules. 20
1 Functions of Environment Sensing Subsystem
The Environment Sensing Subsystem (ESS) of a Connected Autonomous Vehicle (CAV):
- Uses all Subsystem devices to acquire as much as possible information from the Environment as electromagnetic and acoustic data.
- Receives an initial estimate of the Ego CAV’s Spatial Attitude generated by the Motion Actuation Subsystem
- Receives Environment Data (e.g., temperature, pressure, humidity, etc.) from the Motion Actuation Subsystem.
- Produces a sequence of Basic Environment Representations (BER) for the journey.
- Passes the Basic Environment Representations to the Autonomous Motion Subsystem.
2 Reference Architecture of Environment Sensing Subsystem
Figure 4 gives the Environment Sensing Subsystem Reference Model.
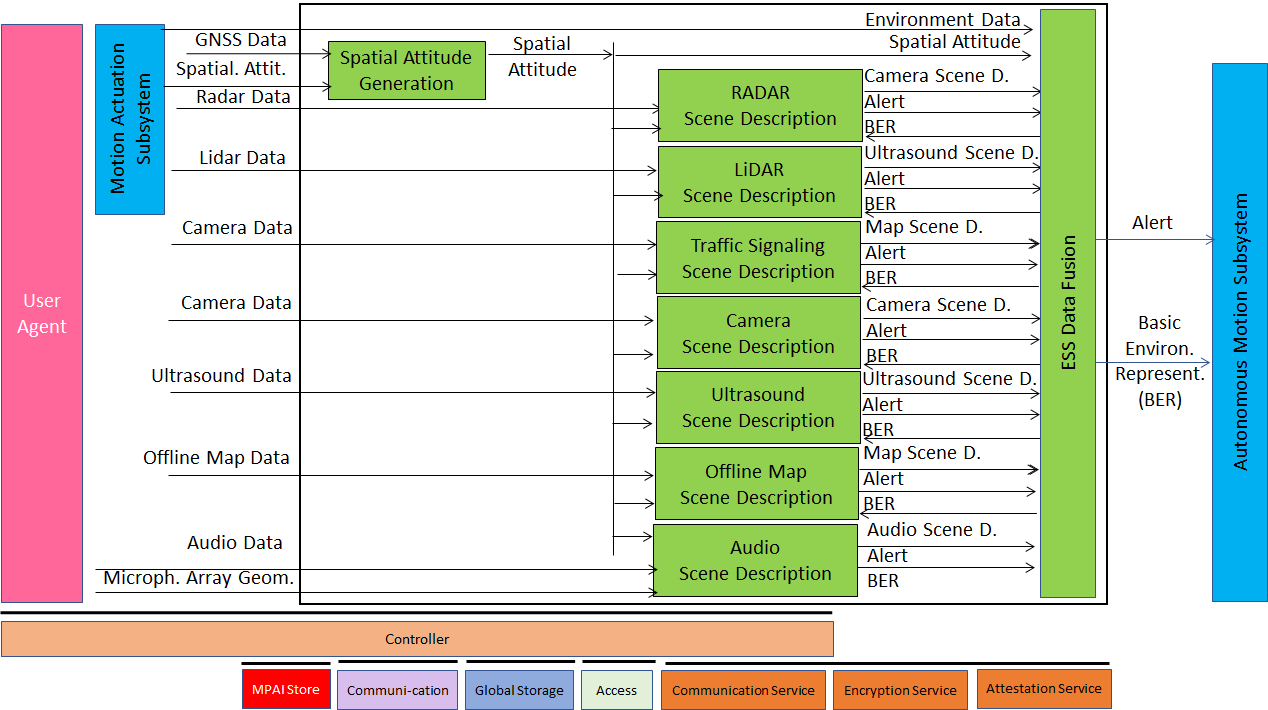
Figure 4 – Environment Sensing Subsystem Reference Model
The typical sequence of operations of the Environment Sensing Subsystem is:
- Compute the CAV’s Spatial Attitude using the initial Spatial Attitude provided by the Motion Actuation Subsystem and the GNSS.
- Receives Environment Sensing Technology (EST)-specific Data, e.g., RADAR Data provided by the RADAR EST.
- Produce and send EST-specific Alert, if necessary, to Autonomous Motion Subsystem.
- Access the Basic Environment Representation at a previous time if necessary.
- Produce EST-specific Scene Descriptors, e.g., the RADAR Scene Descriptors.
- Integrate the Scene Descriptors from different ESTs into the Basic Environment Representation.
Note that Figure 4 assumes that:
- Traffic Signalisation Recognition produces the Road Topology by analysing Visual Data. The model of Figure 4 can easily be extended to the case where Data from other ESTs is processed to compute or help compute the Road Topology.
- Environment Sensing Technologies are individually processed. An implementation may combine a single Scene Descriptors from two or more ESTs preserving the relevant interfaces.
3 I/O Data of Environment Sensing Subsystem
The currently considered Environment Sensing Technologies (EST) are:
- Global navigation satellite system or GNSS (~1 & 1.5 GHz Radio).
- Geographical Position and Orientation, and their time derivatives up to 2nd order (Spatial Attitude).
- Visual Data in the visible range, possibly supplemented by depth information (400 to 700 THz).
- LiDAR Data (~200 THz infrared).
- RADAR Data (~25 & 75 GHz).
- Ultrasound Data (> 20 kHz).
- Audio Data in the audible range (16 Hz to 20 kHz).
- Spatial Attitude (from the Motion Actuation Subsystem).
- Other environmental data (temperature, humidity, …).
Offline Map data can be accessed either from MPAI Store information or online.
Table 6 gives the input/output data of the Environment Sensing Subsystem.
Table 6 – I/O data of Environment Sensing Subsystem
| Input data | From | Comment |
| Radar Data | ~25 & 75 GHz Radio | Capture Environment with Radar |
| Lidar Data | ~200 THz infrared | Capture Environment with Lidar |
| Visual Data | Video (400-800 THz) | Capture Environment with cameras |
| Ultrasound Data | Audio (>20 kHz) | Capture Environment with Ultrasound |
| Offline Map Data | Local storage or online | cm-level data at time of capture |
| Audio Data | Audio (16 Hz-20 kHz) | Capture Environment or cabin with Microphone Array |
| Microphone Array Geometry | Microphone Array | Microphone Array disposition |
| Global Navigation Satellite System (GNSS) Data | ~1 & 1.5 GHz Radio | Get Pose from GNSS |
| Spatial Attitude | Motion Actuation Subsystem | To be fused with GNSS data |
| Other Environment Data | Motion Actuation Subsystem | Temperature etc. added to Basic Environment Representation |
| Output data | To | Comment |
| Alert | Autonomous Motion Subsystem | Critical information from an EST. |
| Basic Environment Representation | Autonomous Motion Subsystem | ESS-derived representation of external Environment |
1.4 Functions of Environment Sensing Subsystem’s AI Modules
Table 7 gives the functions of all AIMs of the Environment Sensing Subsystem.
Table 7 – Functions of Environment Sensing Subsystem’s AI Modules
| AIM | Function |
| RADAR Scene Description | Produces RADAR Scene Descriptors and Alert from RADAR Data. |
| LiDAR Scene Description | Produces LiDAR Scene Descriptors and Alert from LiDAR Data. |
| Traffic Signalisation Recognition | Produces Road Topology of the Environment from Visual and LiDAR Data. |
| Visual Scene Description | Produces Visual Scene Descriptors and Alert from Visual Data. |
| Ultrasound Scene Description | Produces Ultrasound Scene Descriptors and Alert from Ultrasound Data. |
| Online Map Scene Description | Produces Online Map Data Scene Descriptors from Online Map Data. |
| Audio Scene Description | Produces Audio Scene Descriptors and Alert from Audio Data. |
| Spatial Attitude Generation | Computes the CAV Spatial Attitude using information received from GNSS and Motion Actuation Subsystem with respect to CAV Centre. |
| Environment Sensing Subsystem Data Fusion | Receives critical Environment Representation as Alert and Scene Descriptors from the different ESTs.
The Basic Environment Representation (BER) includes all available information from ESS that enables the CAV to define a Path in the Decision Horizon Time. The BER results from the integration of: 1. The different Scene Descriptors generated by the different EST-specific Scene Description AIMs. 2. Environment Data. 3. The Spatial Attitude of the Ego CAV (Figure 5). |
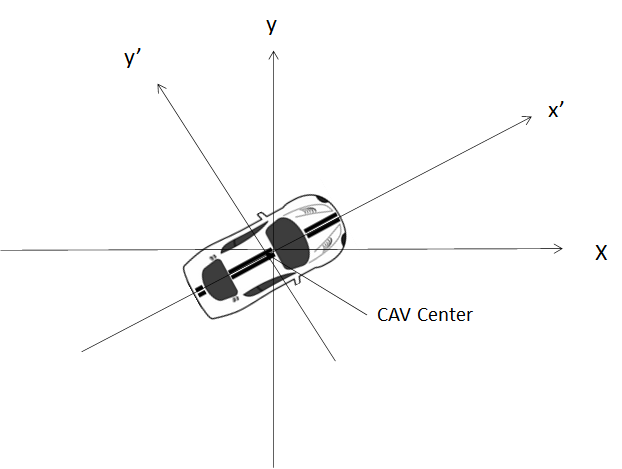
Figure 5 – Spatial Attitude in a CAV
1.5 I/O Data of Environment Sensing Subsystem’s AI Modules
For each AIM (1st column), Table 8 gives the input (2nd column) and the output data (3rd column) of the Environment Sensing Subsystem. Note that the Basic Environment Representation in column 2 refers to the previously produced BER.
Table 8 – I/O Data of Environment Sensing Subsystem’s AI Modules
| AIM | Input | Output |
| Radar Scene Description | Radar Data Basic Environment Representation |
Alert Radar Scene Descriptors |
| Lidar Scene Description | Lidar Data
Basic Environment Representation |
Alert Lidar Scene Descriptors |
| Traffic Signalisation Recognition | Visual Data Basic Environment Representation |
Alert
Road Topology |
| Visual Scene Description | Visual Data Basic Environment Representation |
Alert Lidar Scene Descriptors |
| Ultrasound Scene Description | Ultrasound Data Basic Environment Representation |
Alert Ultrasound Scene Descriptors |
| Map Scene Description | Offline Map Data Basic Environment Representation |
Alert Map Scene Descriptors |
| Audio Scene Description | Audio Data Basic Environment Representation |
Alert Audio Scene Descriptors |
| Spatial Attitude Generation | GNSS Data Spatial Attitude form MAS |
Spatial Attitude |
| Environment Sensing Subsystem Data Fusion | RADAR Scene Descriptors LiDAR Scene Descriptors Road Topology Lidar Scene Descriptors Ultrasound Scene Descriptors Map Scene Descriptors Audio Scene Descriptors Spatial Attitude Other Environment Data |
Alert Basic Environment Representation |