<–Environment Sensing Subsystem (ESS) Go to ToC Motion Actuation Subsystem (MAS)–>
Index
6.2 Reference Architecture of Subsystem
6.3 Input/Output Data of Subsystem
6.5 Input/Output Data of AI Modules
6.1 Functions of Subsystem
The typical series of operations carried out by the Autonomous Motion Subsystem (AMS) is described below. Note that the sequential description does not imply that an operations can only be carried out after the preceding one has been completed.
- Human-CAV Interaction requests Autonomous Motion Subsystem to plan and move the CAV to the human-selected destination. A dialogue between AMS-HCI-human may follow.
- Computes the Route satisfying the human’s request.
- Receives the current Basic Environment Representation from Environment Sensing Subsystem.
- While moving, the CAV:
- Broadcasts a subset of the Basic Environment Representation and other data to CAVs in range.
- Receives subsets of Basic Environment Representations and other data from other CAVs.
- Produces the Full Environment Representation by fusing its own Basic Environment Representation with those from other CAVs in range.
- Plans a Path connecting Poses.
- Selects behaviour and motion to reach the next Pose acting on information about the Poses other CAVs in range intend to reach and the Objects between the current Pose and the next Pose.
- Defines a Trajectory that:
- Complies with general traffic regulations and local traffic rules.
- Preserves passengers’ comfort.
- Refines Trajectory to avoid obstacles.
- Sends Commands to the Motion Actuation Subsystem to take the CAV to the next Pose.
- Stores the data resulting from a decision (Route Planner, Path Planner etc.)
The AMS should take into account that different levels of autonomy, e.g., those indicated by SAE International [12] are possible depending on the amount and level of available functionalities.
6.2 Reference Architecture of Subsystem
Figure 7 gives the Autonomous Motion Subsystem Reference Model.
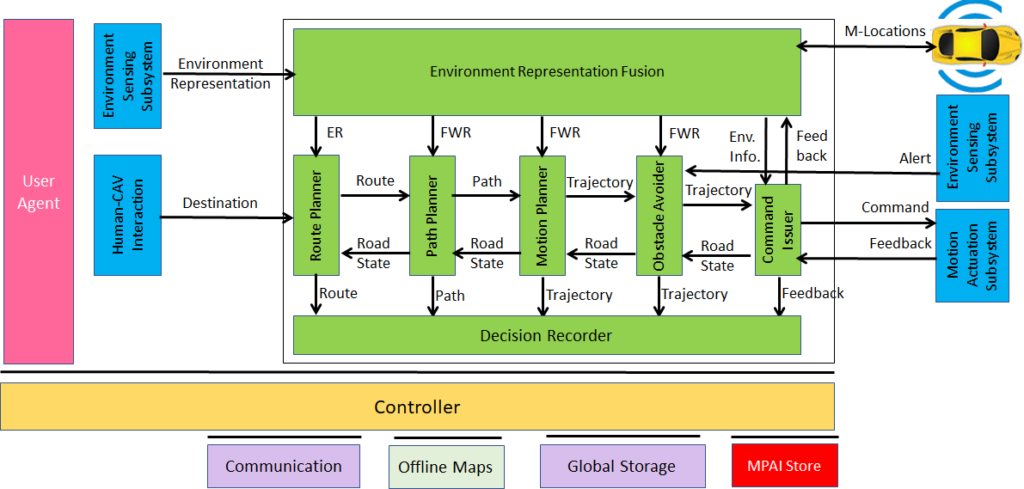
Figure 7 – Autonomous Motion Subsystem Reference Model
This is the operation according to the Reference Model:
- A human requests the Human-CAV Interaction to be transported to a destination.
- This request is interpreted and passed to the AMS.
- The AMS activates the Route Planner to generate a set of Waypoints starting from the current Pose, obtained from the Full Environment Representation, up to the destination.
- The Waypoints enter the Path Planner which generates a set of Poses to reach the next Waypoint.
- For each Path, the Motion Planner generates a Trajectory to reach the next Pose.
- The Obstacle Avoider AIM receives the Trajectory and checks if there is a last-minute change, detected from Alert.
- If an Alert was received, the Obstacle Avoider AIM checks whether the implementation of the Trajectory creates a collision, especially with the Object creating the Alert.
- If a collision is indeed detected, the Obstacle Avoider AIM requests a new Trajectory from the Motion Planner.
- If no collision is detected, Obstacle Avoider AIM issues a Command to the Motion Actuation Subsystem.
- The Motion Actuation Subsystem sends Feedback about the execution of the Command.
- The AMS, based on the MAS-AMS Responses received and the potential discovery of changes in the Environment, can decide to discontinue the execution of the earlier Command and issue another AMS-MAS Command instead.
- The decision of each element of the said chain may be recorded.
6.3 Input/Output Data of Subsystem
Table 9 gives the input/output data of Autonomous Motion Subsystem.
Table 9 – I/O data of Autonomous Motion Subsystem
| Input data | From | Comment |
| Command from HCI | Human-CAV Interaction | Human commands, e.g., “take me home” |
| Basic Environment Representation | Environment Sensing Subsystem | CAV’s Environment representation. |
| Other V2X Data | Other CAVs | Other CAVs and vehicles, and roadside units. |
| Feedback from MAS | Motion Actuation Subsystem | CAV’s response to Command. |
| Output data | To | Comment |
| Response to HCI | Human-CAV Interaction | MAS’s response to AMS Command |
| Command to MAS | Motion Actuation Subsystem | Macro-instructions, e.g., “in 5s assume a given State”. |
| Full Environment Representation | Other CAVs | For information to other CAVs |
6.4 Functions of AI Modules
Table 10 gives the AI Modules of the Autonomous Motion Subsystem.
Table 10 – AI Modules of Autonomous Motion Subsystem
| AIM | Function |
| Route Planner | |
| Path Planner | Generates a set of Paths, considering:
|
| Motion Planner | Defines a Goal and a Trajectory to reach the Goal using the Spatial Attitude satisfying the CAV’s kinematic and dynamic constraints and considering passengers’ comfort. |
| Obstacle Avoider | Checks that the Trajectory is compatible with any Alert information. If it is, it passes the Trajectory to the Command Issuer. If it is not, it requests a new Trajectory. If Command Issuer informs Obstacle Avoider that there is an anomalous situation, Obstacle Avoider may issue a “discontinue previous Command” and forward to the next appropriate upstream AIM, possibly including the Route Planner. This may decide to communicate the Road State to the Human-CAV Interaction Subsystem. |
| Command Issuer | Instructs the MAS to execute the Trajectory considering the Environment conditions and receives MAS-AMS Responses about the execution. |
| Full Environment Representation Fusion | Creates an internal representation of the Environment by fusing information from itself, CAVs in range and other transmitting units. |
6.5 Input/Output Data of AI Modules
Table 11 gives, for each AIM (1st column), the input data (2nd column) and the output data (3rd column).
Table 11 – CAV Autonomous Motion Subsystem data
| CAV/AIM | Input | Output |
| Route Planner | Pose
Destination Offline maps |
Route
Estimated time |
| Full Environment Representation | Alert
Basic Environment Representations Other V2X Data |
Full Environment Representation |
| Path Planner | Offline maps
Route Full Environment Representation |
Set of Paths |
| Motion planner | Path
Full Environment Representation |
Trajectory |
| Obstacle Avoider | Trajectory
Full Environment Representation |
Trajectory
Route State |
| Command to AMS | Trajectory
Environment Data Feedback |
Command |
| Ego and Other CAVs | CAV identity and model | CAV identity and model |
| Ego and Other CAVs | Basic Environment Representation | Basic Environment Representation |
| Ego and Other CAVs | Full Environment Representation | Full Environment Representation |
| Ego and Other CAVs | Messages | Messages |
The AMS may harvest available bandwidth and utilise it to send a version of the Full Environment Representation that is compatible with
<–Environment Sensing Subsystem (ESS) Go to ToC Motion Actuation Subsystem (MAS)–>