<–References Go to ToC Environment Sensing Subsystem (ESS)) –>
Index
4.2 Reference Architecture of Subsystem
4.3 Input/Output Data of Subsystem
4.4 Functions of the AI Modules
4.5 Input/Output Data of AI Modules
4.1 Functions of Subsystem
The Human-CAV Interaction (HCI) Subsystem performs the following high-level functions:
- Authenticates humans e.g., for the purpose of letting them into the CAV.
- Interprets and executes commands provided by humans, possibly after a dialogue, e.g., to go to a Waypoint, issue commands such as turn off air conditioning, open window, call a person, search for information, etc.
- Displays Full Environment Representation to passengers via a viewer and allows passengers to control the display.
- Interprets conversation utterances with the support of the extracted Personal Statuses of the humans, e.g., on the fastest way to reach a Waypoint because of an emergency, or during a casual conversation.
- Displays itself as a Body and Face with a mouth uttering Speech showing a Personal Status comparable to the Personal Status that a human counterpart (e.g., driver, tour guide, interpreter) would display in similar circumstances.
The HCI operation is highly influenced by the notion of Personal Status, the set of internal characteristics of conversation humans and machines. See Annex 1 Section 1.
Reference Architecture of Subsystem
Reference Architecture of Subsystem
4.2 Reference Architecture of Subsystem
Figure 3 gives the Human-CAV Interaction (HCI) Reference Model supporting the case of a group of humans approaching the CAV from outside the CAV and sitting inside the CAV.
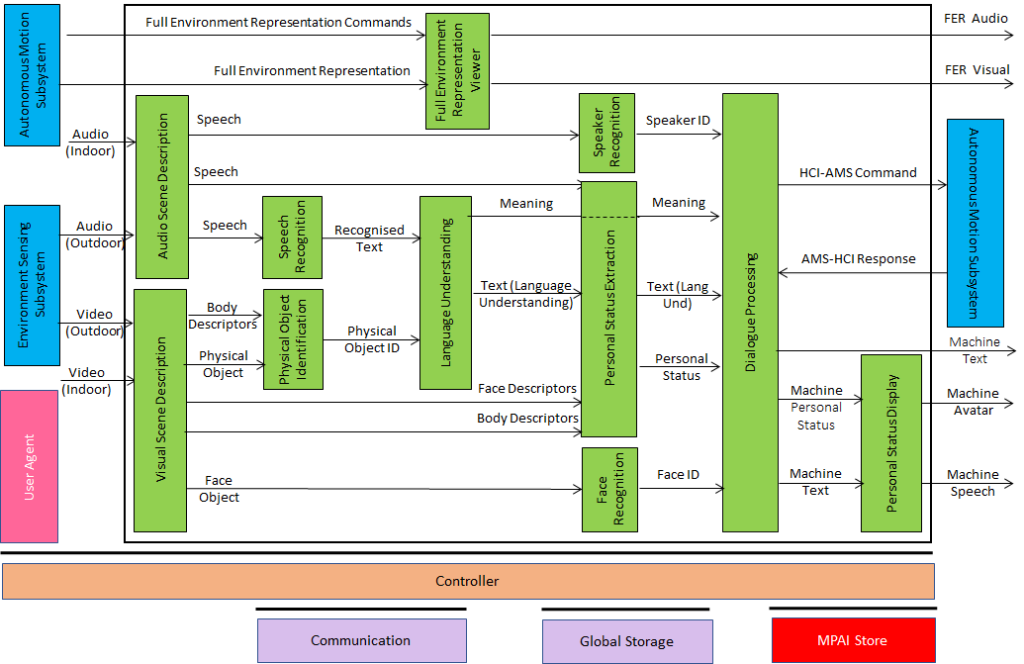
Figure 3 – Human-CAV Interaction Reference Model
The HCI operation is considered in two outdoor and indoor human-CAV interaction scenarios:
- When a group of humans approaches the CAV from outside the CAV:
- The Audio Scene Description AIM creates the Audio Scene Descriptions in the form of Audio (Speech) Objects corresponding to each speaking human in the Environment (close to the CAV).
- The Visual Scene Description creates the Visual Scene Description and provides 1) the Face and Physical Objects and 2) the Body and Face Descriptors corresponding to each human in the Environment (close to the CAV).
- The Speaker Recognition and Face Recognition AIMs authenticate the humans the HCI is interacting with.
- The Speech Recognition AIM recognises the speech of each human.
- The Language Understanding AIM produces the refined Text (Language Understanding) and extracts the Meaning.
- The Personal Status Extraction AIM extracts the Personal Status of the humans from 1) Speech, 2) Face and Body Descriptors, 3) Text (Language Understanding) and 4) Meaning.
- The Dialogue Processing AIM 1) validates the human Identities, 2) responds to human utterances, 3) displays the Face and Body of the HCI Personal Status, and 4) issues commands to the Autonomous Motion Subsystem.
- When a group of humans sit inside the CAV:
- The Audio Scene Description AIM creates the Audio Scene Descriptions in the form of Audio (Speech) Objects corresponding to each speaking human in the cabin.
- The Visual Scene Description creates the Visual Scene Descriptors in the form of Face Descriptors corresponding to each human in the cabin.
- The Speaker Recognition and Face Recognition AIMs identify the humans the HCI is interacting with.
- The Speech Recognition AIM recognises the speech of each human.
- The Language Understanding AIM extracts the Meaning and produces the refined Text (Language Understanding).
- The Personal Status Extraction AIM extracts the Personal Status of the humans.
- The Dialogue Processing AIM validates the human Identities, responds to human utterances, displays the HCI Personal Status, and issues commands to the Autonomous Motion Subsystem.
Notes related to the two scenarios:
- HCI interacts with the humans sitting in the cabin in two ways:
- By responding to commands/queries from one or more humans at the same time, e.g.:
- Commands to go to or park at a Waypoint, etc.
- Commands with an effect on the cabin, e.g., turn off air conditioning, turn on the radio, call a person, open window or door, search for information etc.
- By conversing with and responding to questions from one or more humans at the same time about travel-related issues (in-depth domain-specific conversation), e.g.:
- Humans request information, e.g., time to destination, route conditions, weather at destination, etc.
- Humans ask questions about objects in the cabin or held by humans.
- By responding to commands/queries from one or more humans at the same time, e.g.:
- CAV offers alternatives to humans, e.g., long but safe way, short but likely to have interruptions.
- By following the conversation on travel matters held by humans in the cabin if:
- The passengers allow the HCI to follow the conversation, and
- The processing is carried out inside the CAV and is held confidential.
- While in the cabin, passengers can become aware of the external Environment by issuing Full Environment Representation (FER) Commands to navigate the Full Environment Representation.
- When conversing with the humans in the cabin, the HCI displays itself as a speaking avatar via the Personal Status Display AI Module.
4.3 Input/Output Data of Subsystem
Table 3 gives the input/output data of the Human-CAV Interaction Subsystem.
Table 3 – I/O data of Human-CAV Interaction
| Input data | From | Comment |
| Audio (ESS) | Environment Sensing Subsystem | User authentication
User command User conversation |
| Audio | Cabin Passengers | User’s social life
Commands/interaction with HCI |
| Video (ESS) | Environment Sensing Subsystem | Commands/interaction with HCI |
| Video | Cabin Passengers | User’s social life
Commands/interaction with HCI |
| Full Environment Representation | Autonomous Motion Subsystem | Rendered by Full Environment Representation Viewers |
| Full Environment Representation Commands | Cabin Passengers | To control rendering of Full Environment Representation |
| Output data | To | Comments |
| Output Speech | Humans in Environment
Cabin Passengers |
HCI’s response to passengers |
| Output Face | Cabin Passengers | HCI’s face when conversing |
| Output Body | Cabin Passengers | HCI’s body when conversing |
| Output Text | Cabin Passengers | HCI’s response to passengers |
| Full Environment Representation Audio | Passenger Cabin | For passengers to hear external Environment |
| Full Environment Representation Video | Passenger Cabin | For passengers to view external Environment |
1.4 Functions of the AI Modules
Table 4 gives the functions of all Environment Sensing Subsystem AIMs.
Table 4 – AI Modules of the Environment Sensing Subsystem
| AIM | Function |
| Audio Scene Description | Produces the Audio Scene Descriptors using the Audio captured by the appropriate (indoor or outdoor) Microphone Array. |
| Visual Scene Description | Produces the Visual Scene Descriptors using the visual information captured by the appropriate (indoor or outdoor) visual sensors. |
| Speech Recognition | Converts speech into Text. |
| Physical Object Identification | Provides the ID of the class of objects of which the Physical Object is an Instance |
| Full Environment Representation Viewer | Converts the Full Environment Representation produced by the Autonomous Motion Subsystem into Audio-Visual Scene Descriptors that can be perceptibly rendered. |
| Language Understanding | Improves the Text from Speech Recognition by using context information (e.g., Instance ID of object). |
| Speaker Recognition | Provides Speaker ID from Speech. |
| Personal Status Extraction | Provides the Personal Status of human. |
| Face Recognition | Provides Face ID from Face. |
| Dialogue Processing | Provides:
|
| Personal Status Display | Produces Speech, and Machine Face and Body. |
1.5 Input/Output Data of AI Modules
Table 5 gives the input/output data of the Human-CAV Interaction AIMs.
Table 5 – AI Modules of Human-CAV Interaction
| AIM | Input | Output |
| Audio Scene Description | Environment Audio (outdoor)
Environment Audio (indoor) |
Speech Objects |
| Visual Scene Description | Environment Video (outdoor)
Environment Video (indoor) |
Face Objects
Physical Objects Body Descriptors Face Descriptors |
| Speech Recognition | Speech Object | Recognised Text |
| Physical Object Identification | Physical Object
Human Object |
Object ID |
| Full Environment Representation Viewer | FER Commands | FER Audio
FER Visual |
| Language Understanding | Recognised Text
Personal Status Object ID |
Meaning
Personal Status Text (Language Understanding) |
| Speaker Recognition | Speech Descriptors | Speaker ID |
| Personal Status Extraction | Recognised Text
Speech Object Face Object Human Object |
Personal Status |
| Face Recognition | Face Object | Face ID |
| Dialogue Processing | Speaker ID
Meaning Text (Language Understanding) Personal Status Face ID AMS-HCI Response |
AMS-HCI Commands
Output Text Output Personal Status
|
| Personal Status Display | Machine Text
Output Personal Status |
Machine Avatar
Machine Text Machine Speech |
<–References Go to ToC Environment Sensing Subsystem (ESS)) –>