1 Functions of Motion Actuation Subsystem
2 Reference Architecture of Motion Actuation Subsystem
3 I/O Data of Motion Actuation Subsystem
4 Functions of Motion Actuation Subsystem’s AI Modules
5 I/O Data of Motion Actuation Subsystem’s AI Modules
1 Functions of Motion Actuation Subsystem
The Motion Actuation Subsystem:
- Transmits spatial and environmental information gathered from its sensors and mechanical subsystems to the Environment Sensing Subsystem.
- Receives AMS-MAS Commands from the Autonomous Motion Subsystem.
- Translates AMS-MAS Commands into specific Commands to its own mechanical subsystems, e.g., brakes, steering wheel, and wheel motors.
- Receives Responses from its mechanical subsystems.
- Packages Responses into a MAS-AMS Response.
- Sends MAS-AMS Responses to Autonomous Motion Subsystem.
- During the execution, the MAS may send MAS-AMS Responses containing Spatial Attitudes and other data obtained through actuation of its mechanical subsystems, e.g., ice on the road, at intermediate Poses/Times.
2 Reference Architecture of Motion Actuation Subsystem
Figure 1 represents the Motion Actuation Subsystem Reference Model.
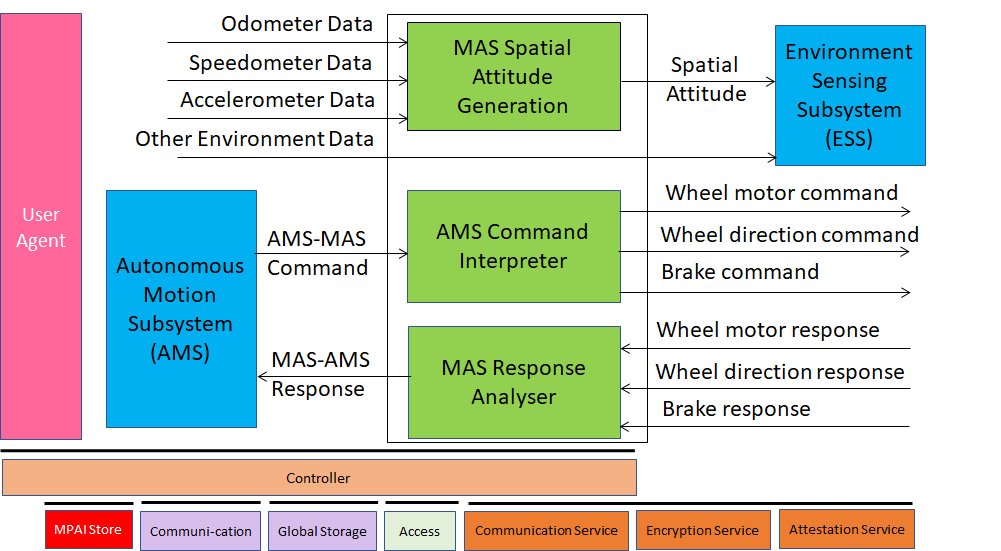
Figure 1 – Motion Actuation Subsystem Reference Model
The operation of the Motion Actuation Subsystem unfolds as follows:
- Other Environment Data are transferred to the Environment Sensing Subsystem.
- MAS Spatial Attitude Generation sends to Environment Sensing Subsystem the Ego CAV Spatial Attitude computed using Odometer, Speedometer, and Accelerometer.
- AMS Command Interpreter issues commands by interpreting AMS-MAS Commands received from Autonomous Motion Subsystem to Wheel motor, Steering wheel, and Brakes.
- MAS Response Analyser sends MAS-AMS Responses by interpreting responses receives from Wheel motor, Steering wheel, and Brakes.
3 I/O Data of Motion Actuation Subsystem
Table 12 gives the input/output data of Motion Actuation Subsystem.
Table 12 – I/O data of Motion Actuation Subsystem
| Input | Comments |
| Odometer | Provides distance data. |
| Speedometer | Provides instantaneous velocity. |
| Accelerometer | Provides instantaneous acceleration. |
| Other Environment data | Other environment data, e.g., humidity, pressure, temperature. |
| AMS-MAS Command | High-level motion command. |
| Wheel Motor Response | Forces wheels rotation, gives feedback. |
| Steering Wheel Response | Moves wheels by an angle, gives feedback. |
| Brake Response | Acts on brakes, gives feedback. |
| Output | Comments |
| Spatial Attitude | Position, Orientation and their velocity and acceleration vectors. |
| Other Environment data | Other environment data, e.g., humidity, pressure, temperature. |
| Wheel Motor Command | Forces wheels rotation, gives feedback. |
| Steering Wheel Command | Moves wheels by an angle, gives feedback. |
| Brakes Command | Acts on brakes, gives feedback. |
| MAS-AMS Response | Feedback from MAS Response Analyser during and after AMS-MAS Command execution. |
4 Functions of Motion Actuation Subsystem’s AI Modules
Table 13 gives the AI Modules of Autonomous Motion Subsystem.
Table 13 – Functions of Motion Actuation Subsystem’s AI Modules
| AIM | Function |
| MAS Spatial Attitude Generation | Computes Ego CAV’s Spatial Attitude using GNSS, odometer, speedometer, and accelerometer data. |
| AMS Command Interpreter | Receives, analyses, and actuates AMS-MAS Commands into specific commands to Brakes, Wheel directions, and Wheel motors |
| MAS Response Analyser | Receives and analyses responses from Brakes, Wheel direction, and Wheel motor. Assembles and forwards the MAS-AMS Response to AMS. |
5 I/O Data of Motion Actuation Subsystem’s AI Modules
Table 14 gives, for each AIM (1st column), the input data (2nd column) from which AIM (column) and the output data (3rd column).
Table 14 – I/O Data of Motion Actuation Subsystem’s AI Modules
| CAV/AIM | Input | Output |
| MAS Spatial Attitude Generation | Odometer Speedometer Accelerometer |
Spatial Attitude |
| AMS Command Interpreter | AMS-MAS Command
|
Brake Command Wheel Motor Command Steering Wheel Command |
| MAS Response Analyser | Brake Response Steering Wheel Response Wheel Motor Response |
MAS-AMS Response
|