Function
Ref. Model
I/O Data
SubAIMs
JSON MData
Profiles
Ref. Software
Conformance
Performance
1 Functions
The Trajectory Planning and Decision (CAV‑TPD) AIM:
| Receives | AMS Data | Data collected by AMS Memory. |
| Alert | Alert message from ESS. | |
| AMS‑MAS Message | Response from MAS. | |
| Full Environment Descriptors | From Full Environment Description. | |
| Route Response | From Route Selection Planning. | |
| Route Request | To Route Selection Planning. | |
| Produces | Full Environment Descriptors | To Full Environment Description. |
| AMS‑MAS Message | Message to MAS. | |
| CAV State | To Full Environment Description and MAS. | |
| Road State | To Full Environment Description and MAS. | |
| Alert | To AMS Memory. |
2 Reference Model
Figure 1 depicts the Reference Model of the Trajectory Planning and Decision (CAV‑TPD) AIM.
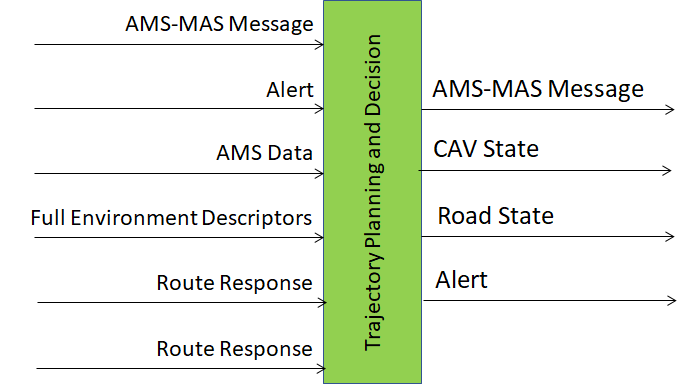
Figure 1 – The Trajectory Planning and Decision (CAV‑TPD) AIM
3 I/O Data
Table 1 specifies the Input and Output Data of the Trajectory Planning and Decision (CAV‑TPD) AIM.
| Input | Description |
|---|---|
| AMS Data | Data collected by AMS Memory. |
| Alert | Alert message from ESS. |
| AMS‑MAS Message | Response from MAS. |
| Full Environment Descriptors | From Full Environment Description. |
| Route Response | From Route Selection Planning. |
| Route Request | To Route Selection Planning. |
| Output | Description |
| Full Environment Descriptors | To Full Environment Description. |
| AMS‑MAS Message | Message to MAS. |
| CAV State | Update from AMS‑MAS Message. |
| Road State | Update from AMS‑MAS Message. |
| Alert | Alert for storage in AMS Memory. |
4 SubAIMs
4.1 Functions of SubAIMs
The Trajectory Planning and Decision (CAV‑TPD) AIM is a Composite AIM whose Reference Model is depicted in Figure 2.
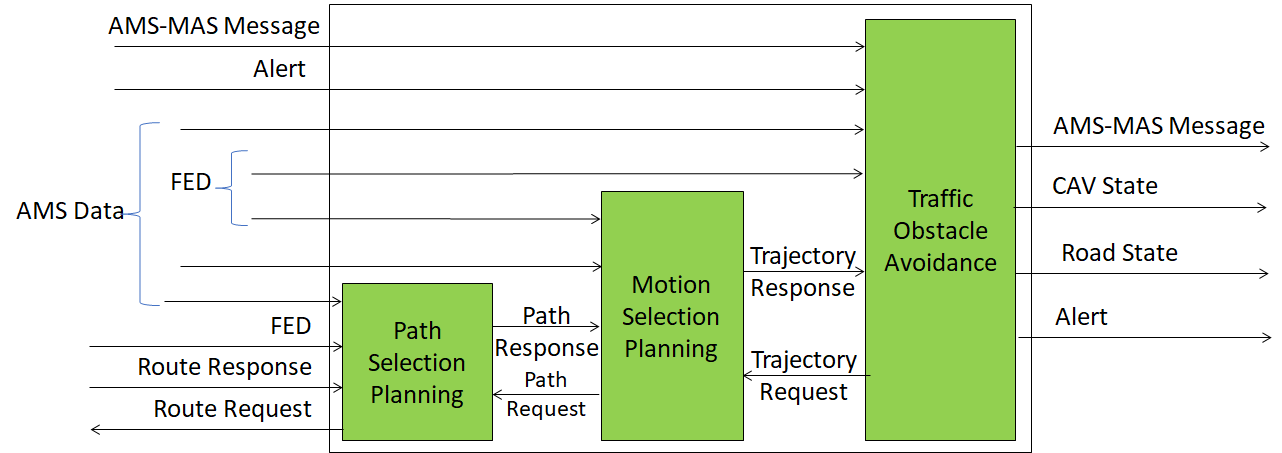
Figure 2 – The Trajectory Planning and Decision (CAV‑TPD) Composite AIM
4.2 Operation
Trajectory Planning and Decision receives a Route that is used across Path Selection Planning and Motion Selection Planning. It also receives AMS‑MAS Message from Motion Actuation Subsystem and Alert from Environment Sensing Subsystem and sends an AMS‑MAS Message to Motion Actuation Subsystem.
4.3 I/O Data of SubAIMs
Table 2 gives the Input and Output Data of the CAV‑TPD SubAIMs.
4.4 AIMs and JSON Metadata
Table 3 provides the links to the AIM specifications and JSON schemas. AIM1 indicates the Composite AIM and AIM2 its SubAIMs.
| AIM1 | AIM2 | Name | JSON |
|---|---|---|---|
| CAV‑TPD | Trajectory Planning and Decision | X | |
| CAV‑PSP | Path Selection Planning | X | |
| CAV‑MSP | Motion Selection Planning | X | |
| CAV‑TOA | Traffic Obstacle Avoidance | X |
5 JSON Metadata
https://schemas.mpai.community/CAV2/V1.1/AIMs/TrajectoryPlanningAndDecision.json
6 Profiles
No Profiles.
7 Reference Software
Not part of this specification.
8 Conformance Testing
Table 4 provides the Conformance Testing Method for the Trajectory Planning and Decision (CAV‑TPD) Composite AIM. Conformance Testing of the individual SubAIMs is given by the individual AIM specifications.
If a schema contains references to other schemas, conformance of data for the primary schema implies that any data referencing a secondary schema shall also validate against the relevant schema, if present, and conform with the Qualifier, if present.
| Receives | AMS Data | Shall validate against AMS Data schema. |
| Alert | Shall validate against Alert schema. | |
| AMS‑MAS Message | Shall validate against AMS‑MAS Message schema. | |
| Full Environment Descriptors | Shall validate against Full Environment Descriptors schema. | |
| Route Response | Shall validate against Interaction schema. | |
| Route Request | Shall validate against Interaction schema. | |
| Produces | Full Environment Descriptors | Shall validate against Full Environment Descriptors schema. |
| AMS‑MAS Message | Shall validate against AMS‑MAS Message schema. | |
| CAV State | Shall validate against CAV State schema. | |
| Road State | Shall validate against Road State schema. | |
| Alert | Shall validate against Alert schema. |
9 Performance Assessment
Not part of this specification.