1 Functions of Autonomous Motion Subsystem.. 21
2 Reference Architecture of Autonomous Motion Subsystem.. 21
3 I/O Data of Autonomous Motion Subsystem.. 22
4 Functions of Autonomous Motion Subsystem’s AI Modules. 23
5 I/O Data of Autonomous Motion Subsystem’s AI Modules 23
1 Functions of Autonomous Motion Subsystem
The functions of the Autonomous Motion Subsystem (AMS) are:
- Receive a request to reach a destination as instructed by Human-CAV Interaction (HCI).
- Request current Pose to Environment Sensing Subsystem (ESS).
- Converse with HCI and settle on final Route.
- Receive Basic Environment Representation (BER) from ESS.
- Broadcast appropriate BER subsets to Remote AMSs.
- Respond to specific Remote AMS requests.
- Produce Full Environment Representation.
- Generate Paths (Plath Planner).
- Generate Goal and Trajectory (Motion Planner).
- Check whether Trajectory can be implemented (Obstacle Avoider).
- Issue Command to Motion Actuation Subsystem.
2 Reference Architecture of Autonomous Motion Subsystem
Figure 6 gives the Autonomous Motion Subsystem Reference Model.
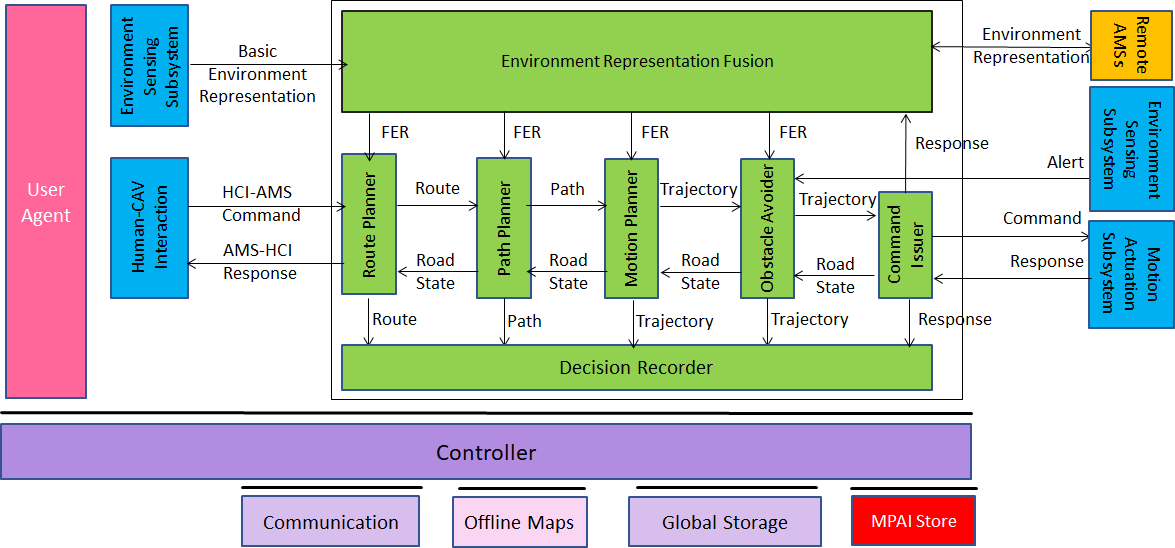
Figure 6 – Autonomous Motion Subsystem Reference Model
This is the operation of the Reference Model:
- A human requests the Human-CAV Interaction to take them to a destination.
- HCI interprets request and passes interpretation to the AMS.
- The AMS activates the Route Planner to generate a set of Waypoints starting from the current Pose, obtained from the Full Environment Representation, up to the destination.
- The Waypoints enter the Path Planner which generates a set of Poses to reach the next Waypoint.
- For each Path, the Motion Planner generates a Trajectory to reach the next Pose.
- Obstacle Avoider receives the Trajectory and checks if an Alert was received.
- If an Alert was received, Obstacle Avoider checks whether the implementation of the Trajectory creates a collision.
- If a collision is indeed detected, Obstacle Avoider requests a new Trajectory from the Motion Planner.
- If no collision is detected, Obstacle Avoider issues a Command to Motion Actuation Subsystem.
- The Motion Actuation Subsystem sends MAS-AMS Response about the execution of the Command.
- The AMS, based on the MAS-AMS Responses received potentially conveying changes in the Environment, can decide to discontinue the execution of the earlier Command and issue another AMS-MAS Command instead.
- The decision of each element of the said chain may be recorded in the Decision Recorder (“black box”).
1.3 I/O Data of Autonomous Motion Subsystem
Table 9 gives the input/output data of Autonomous Motion Subsystem.
Table 9 – I/O data of Autonomous Motion Subsystem
| Input data | From | Comment |
| Basic Environment Representation | Environment Sensing Subsystem | CAV’s Environment representation. |
| Alert | Environment Sensing Subsystem | Critical information from an EST in ESS. |
| HCI-AMS Command | Human-CAV Interaction | Human commands, e.g., “take me home” |
| Environment Representation | Remote AMSs | Other CAVs and vehicles, and roadside units. |
| MAS-AMS Response | Motion Actuation Subsystem | CAV’s response to AMS-MAS Command. |
| Output data | To | Comment |
| AMS-HCI Response | Human-CAV Interaction | MAS’s response to HCI-AMS Command |
| AMS-MAS Command | Motion Actuation Subsystem | Macro-instructions, e.g., “in 5s assume a given Spatial Attitude”. |
| Environment Representation | Remote AMSs | For information to other CAVs |
1.4 Functions of Autonomous Motion Subsystem’s AI Modules
Table 10 gives the AI Modules of the Autonomous Motion Subsystem.
Table 10 – Functions of Autonomous Motion Subsystem’s AI Modules
| AIM | Function |
| Full Environment Representation Fusion | Creates an internal representation of the Environment by fusing information from itself, Remote AMSs, and other CAV-aware entities. |
| Route Planner | |
| Path Planner | Generates a set of Paths, considering: 1. Route. 2. Spatial Attitude. 3. Full Environment Representation. 4. Traffic Rules. |
| Motion Planner | Defines a Goal and a Trajectory to reach the Goal using the Spatial Attitude satisfying the CAV’s kinematic and dynamic constraints and considering passengers’ comfort. |
| Obstacle Avoider | Checks whether the Trajectory is compatible with any Alert information. If it is, it passes the Trajectory to the Command Issuer. If it is not, it requests a new Trajectory. If Command Issuer informs Obstacle Avoider that AMS-MAS Commands cannot be executed, Obstacle Avoider may issue a “discontinue previous Command” and forward to the appropriate upstream AIM, possibly up to the Route Planner. This may decide to communicate the Road State to the Human-CAV Interaction Subsystem. |
| Command Issuer | Instructs the MAS to execute the Trajectory considering the Environment conditions and receives MAS-AMS Responses about the execution. Based on the Response the Road State may be communicated to the Obstacle Avoider. |
| Decision Recorder | Records decisions by Route Planner, Path Planner, Motion Planner, Obstacle Avoider, Command Issuer. |
1.5 I/O Data of Autonomous Motion Subsystem’s AI Modules
Table 11 gives, for each AIM (1st column), the input data (2nd column) and the output data (3rd column) of Autonomous Motion Subsystem.
Table 11 – CAV Autonomous Motion Subsystem data
| CAV/AIM | Input | Output |
| Environment Representation Fusion | Basic Environment Representations from ESS or Remote AMSs Other data from Remote AMSs |
Full Environment Representation |
| Remote AMSs | See Table 15 | See Table 15 |
| Route Planner | Full Environment Representation Offline maps Road State |
Route Estimated time of arrival |
| Path Planner | Route Full Environment Representation Offline maps Road State |
Set of Paths |
| Motion Planner | Set of Paths Full Environment Representation Road State |
Trajectory |
| Obstacle Avoider | Trajectory Full Environment Representation Alert Road State |
Trajectory |
| Command Issuer | Trajectory MAS-AMS Response |
AMS-MAS Command |
| Decision Recorder | Route Path Trajectory AMS-MAS Command MAS-AMS Response |
Recorded Data |
The AMS may harvest available bandwidth and utilise it to send a version of the Full Environment Representation that is compatible with the available mobile bandwidth.